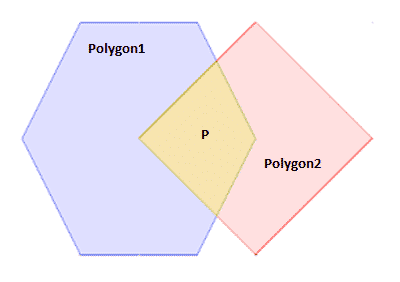
Hello again. I want to explain some basic geometric algorithms to solve a known problem which is Finding Intersection Polygon of two Convex Polygons. I know it is not a new problem, but it is a good example of using solutions of sub-problems to solve a more complex problem. And I want to keep the main algorithm as simple as possible.
I won’t discover those basic algorithms from scratch but I will try to make some briefs about main ideas behind them. First, let me write the main algorithm to the problem in terms of simple geometric operations;
- Create an empty polygon as P
- Add all corners of Polygon1 that is inside Polygon2 to P
- Add all corners of Polygon2 that is inside Polygon1 to P
- Add all intersection points to P
- Order all points in the P counter-clockwise.
As you see the algorithm looks much simpler when you write it in terms of some basic geometric operation. Now it is time to implement those basic Geometric operations. Those are:
- GetIntersectionPoint: Finds intersection point of given line-segments.
- GetIntersectionPoints: Finds intersection point of given line segment and a polygon
- IsPointInsidePoly: Checks if a given point is inside a given convex polygon.
We can write a small Geo-Library to put those helper methods which is GeometryHelper. I add utility code as initial to deal with floating-point issues.
public class GeometryHelper
{
const double EquityTolerance = 0.000000001d;
private static bool IsEqual(double d1, double d2)
{
return Math.Abs(d1-d2) <= EquityTolerance;
}
….
}
And Before we start, it is better to write our own data types
public class ConvexPolygon2D
{
public Point2D[] Corners;
public ConvexPolygon2D(Point2D[] corners)
{
Corners = corners;
}
}
public class Point2D
{
public double X;
public double Y;
public Point2D(double x, double y)
{
X = x;
Y = y;
}
}
Finding Intersection Point of two line segments
We can use Linear algebra to calculate the intersection point of two given line segment.
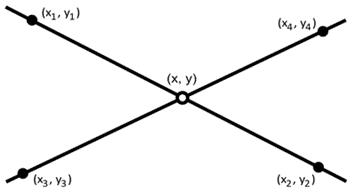
The equation of a line in a 2-D space is written as:
Line: Ax+By = C
So, for given points (x1, y1) and (x2, y2), we can calculate A, B, C values:
A = y2-y1
B = x1-x2
C = A*x1+B*y1
After we calculate A, B, C values for two line segments intersection point can be calculated as follow;
float det = A1*B2 - A2*B1
if(det == 0){
//Lines are parallel
} else{
float x = (B2*C1 - B1*C2)/det
float y = (A1*C2 - A2*C1)/det
}
Let’s Write the code for the function;
//math logic from http://www.wyrmtale.com/blog/2013/115/2d-line-intersection-in-c
public virtual Point2D GetIntersectionPoint(Point2D l1p1, Point2D l1p2, Point2D l2p1, Point2D l2p2)
{
double A1 = l1p2.Y - l1p1.Y;
double B1 = l1p1.X - l1p2.X;
double C1 = A1 * l1p1.X + B1 * l1p1.Y;
double A2 = l2p2.Y - l2p1.Y;
double B2 = l2p1.X - l2p2.X;
double C2 = A2 * l2p1.X + B2 * l2p1.Y;
//lines are parallel
double det = A1 * B2 - A2 * B1;
if (IsEqual(det, 0d))
{
return null; //parallel lines
}
else
{
double x = (B2 * C1 - B1 * C2) / det;
double y = (A1 * C2 - A2 * C1) / det;
bool online1 = ((Math.Min(l1p1.X, l1p2.X) < x || IsEqual(Math.Min(l1p1.X, l1p2.X), x))
&& (Math.Max(l1p1.X, l1p2.X) > x || IsEqual(Math.Max(l1p1.X, l1p2.X), x))
&& (Math.Min(l1p1.Y, l1p2.Y) < y || IsEqual(Math.Min(l1p1.Y, l1p2.Y), y))
&& (Math.Max(l1p1.Y, l1p2.Y) > y || IsEqual(Math.Max(l1p1.Y, l1p2.Y), y))
);
bool online2 = ((Math.Min(l2p1.X, l2p2.X) < x || IsEqual(Math.Min(l2p1.X, l2p2.X), x))
&& (Math.Max(l2p1.X, l2p2.X) > x || IsEqual(Math.Max(l2p1.X, l2p2.X), x))
&& (Math.Min(l2p1.Y, l2p2.Y) < y || IsEqual(Math.Min(l2p1.Y, l2p2.Y), y))
&& (Math.Max(l2p1.Y, l2p2.Y) > y || IsEqual(Math.Max(l2p1.Y, l2p2.Y), y))
);
if (online1 && online2)
return new Point2D(x, y);
}
return null; //intersection is at out of at least one segment.
}
Check if a given point is inside a convex polygon
I took a simple solution which I like beyond many others from a web-site and adapt it to my project.
https://wrf.ecse.rpi.edu//Research/Short_Notes/pnpoly.html
You can check the site for its background. Since it is not my main purpose I won’t deep dive into it. In short, it basically assumes a semi-infinite horizontal ray from the check-point and counts how many times it intersects with the polygon. (Jordan curve theorem)
// taken from https://wrf.ecse.rpi.edu//Research/Short_Notes/pnpoly.html
public bool IsPointInsidePoly(Point2D test, ConvexPolygon2D poly)
{
int i;
int j;
bool result = false;
for (i = 0, j = poly.Corners.Length - 1; i < poly.Corners.Length; j = i++)
{
if ((poly.Corners[i].Y > test.Y) != (poly.Corners[j].Y > test.Y) &&
(test.X < (poly.Corners[j].X - poly.Corners[i].X) * (test.Y - poly.Corners[i].Y) / (poly.Corners[j].Y - poly.Corners[i].Y) + poly.Corners[i].X))
{
result = !result;
}
}
return result;
}
Finding Intersection Points of a line segment and given convex polygon
This is so easy when we have GetIntersectionPoint ready. We simply try line segment with each edge of the polygon and return the collection of intersection points.
public virtual Point2D[] GetIntersectionPoints(Point2D l1p1, Point2D l1p2, ConvexPolygon2D poly)
{
List<Point2D> intersectionPoints = new List<Point2D>();
for (int i = 0; i < poly.Corners.Length; i++)
{
int next = (i + 1 == poly.Corners.Length) ? 0 : i + 1;
Point2D ip = GetIntersectionPoint(l1p1, l1p2, poly.Corners[i], poly.Corners[next]);
if (ip != null) intersectionPoints.Add(ip);
}
return intersectionPoints.ToArray();
}
One Important Tip
Some edge cases, such as two overlapping corners or intersection on a corner can cause some duplicates corner added to the polygon. We can easily get rid of these with such small utility function:
private void AddPoints(List<Point2D> pool, Point2D[] newpoints)
{
foreach (Point2D np in newpoints)
{
bool found = false;
foreach (Point2D p in pool)
{
if (IsEqual(p.X, np.X) && IsEqual(p.Y, np.Y))
{
found = true;
break;
}
}
if (!found) pool.Add(np);
}
}
Ordering the corners of a polygon clockwise
After we find all the corners, all we need to order them to be able to draw it properly. This can be done, by calculating the center point first and then sorting them against the arcTan values of between the center point, corner and a horizontal line. You can see how I do this below;
Point2D[] OrderClockwise(Point2D[] points)
{
double mX = 0;
double my = 0;
foreach (Point2D p in points)
{
mX += p.X;
my += p.Y;
}
mX /= points.Length;
my /= points.Length;
return points.OrderBy(v => Math.Atan2(v.Y - my, v.X - mX)).ToArray();
}
We are ready to write the main algorithm
So since we have each geometric operation implemented, let’s write the method to get the intersection polygon:
public ConvexPolygon2D GetIntersectionOfPolygons(ConvexPolygon2D poly1, ConvexPolygon2D poly2)
{
List<Point2D> clippedCorners = new List<Point2D>();
//Add the corners of poly1 which are inside poly2
for (int i = 0; i < poly1.Corners.Length; i++)
{
if (IsPointInsidePoly(poly1.Corners[i], poly2))
AddPoints(clippedCorners, new Point2D[] { poly1.Corners[i] });
}
//Add the corners of poly2 which are inside poly1
for (int i = 0; i < poly2.Corners.Length; i++)
{
if (IsPointInsidePoly(poly2.Corners[i],poly1))
AddPoints(clippedCorners, new Point2D[]{ poly2.Corners[i]});
}
//Add the intersection points
for (int i = 0, next = 1; i < poly1.Corners.Length; i++, next = (i + 1 == poly1.Corners.Length) ? 0 : i + 1)
{
AddPoints(clippedCorners, GetIntersectionPoints(poly1.Corners[i], poly1.Corners[next], poly2));
}
return new ConvexPolygon2D(OrderClockwise( clippedCorners.ToArray()));
}
To sum up, I hope it has not been a just another copy of widely spread code-blocks about geometric algorithms. My main purpose is to point out a lean approach to develop a bigger algorithm in terms of well-written sub-algorithms.
Hope you enjoy it! :)
References
[1] PNPOLY – Point Inclusion in Polygon Test – WR Franklin (WRF)
https://wrf.ecse.rpi.edu//Research/Short_Notes/pnpoly.html
[2] 2D Line Intersection in C# | WyrmTale articles
http://www.wyrmtale.com/blog/2013/115/2d-line-intersection-in-c

Sinan Oz is an experienced IT professional who has a big passion on software science and algorithms since he attended International Olympiads in Informatics in his early ages. He finished Istanbul Technical University Computer Engineering Department. He worked at Garanti Technology, one of the biggest technology centres in the country for about 5 years. After that, he started Kariyer.net and takes some serious projects as a Lead Architect and he promoted as a Software Development Manager. Currently, he is working at Movie Star Planet Kopenhagen office as a Senior Backend Game Developer.
Please note that it gives incorrect results if vertices of one polygon is on the edge of the other polygon.
For example, a vertex sequence of IN-ON-IN or OUT-ON-OUT should be discarded but an IN-ON-OUT or OUT-ON-IN is a true intersecting vertex.
It’s even more complicated in the case of two consecutive vertices being on the edge of the other polygon.